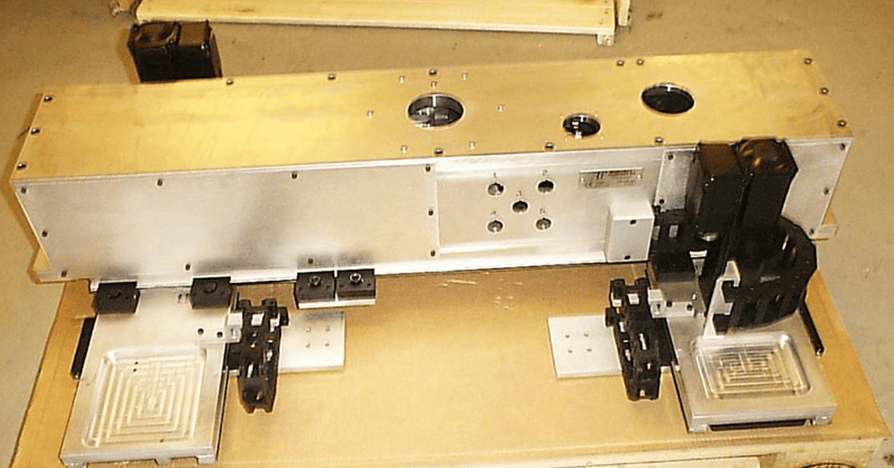
4 gribehoveder og 5 servomotorer
Robotgriber opbygget med 5 servomotorer, hvoraf 4 bruges til positionering af de 4 gribehoveder (delsamlet).
Efter kernerne er udtaget af formværktøjet, bøjes griberen ca, 45 grader, og 2 og 2 dyppes kernerne i slipvæske og roteres for fjernelse af overskydende væske, samt jævn fordeling af den blivende væske. Griberen er helt afskærmet under brugen.